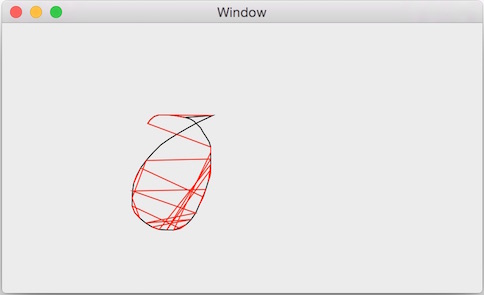
使用该算法的初衷是想找到一个二维点集的有序边界,调用到CGAL中的Alpha_shape2。但是CGAL中的Alpha_shape2获取到的segment是随机的,也就是各个端点是无序的,如下图:
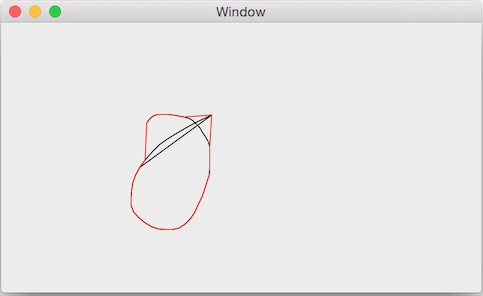
而我们需要的是有序边界,如下图所示:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
|
typedef K::FT FT;
typedef K::Point_2 Point2f;
typedef K::Segment_2 Segment2f;
typedef CGAL::Alpha_shape_2<Triangulation_2> Alpha_shape_2;
std::list<Point2f> points;
...
Alpha_shape_2 A(points.begin(), points.end(),
FTA(10000),
Alpha_shape_2::GENERAL);
std::vector<Segment2f> segments;
alpha_edges(A, std::back_inserter(segments));
std::cout << "Alpha Shape computed" << std::endl;
std::cout << segments.size() << " alpha shape edges" << std::endl;
std::cout << "Optimal alpha: " << *A.find_optimal_alpha(1) << std::endl;
std::vector<Point2f> points_in_segment;
float sumX,sumY = 0.f;
for (auto& seg : segments) {
Point2f p1 (seg.vertex(0).x(),seg.vertex(0).y());
points_in_segment.push_back(p1);
sumX = seg.vertex(0).x() + sumX;
sumY = seg.vertex(0).y() + sumY;
}
Point2f barycenter(sumX/points_in_segment.size(), sumY/points_in_segment.size());
std::vector<float> aBary;
std::vector<int> aBaryIndex;
aBary.clear();
aBaryIndex.clear();
for (int j = 0; j < points_in_segment.size(); ++j) {
aBary.push_back(atan2(points_in_segment[j].y() - barycenter.y(), points_in_segment[j].x() - barycenter.x()));
aBaryIndex.push_back(j);
}
aBaryIndex = Utility::sort_indexes_decline(aBary);
std::vector<Point2f> polygon;
for (int j = 0; j < aBaryIndex.size(); ++j) {
polygon.push_back(points_in_segment[aBaryIndex[j]]);
}
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
|
std::vector<int> sort_indexes_decline(const std::vector<float> &v)
{
std::vector<int> idx(v.size());
std::iota(idx.begin(), idx.end(), 0);
sort(idx.begin(), idx.end(),
[&v](int i1, int i2) {return v[i1] > v[i2]; });
return idx;
}
|
