点云的采样算法,分为上采样和下采样。
上采样:进行点云曲面重建时,所获得的点云数量稀缺,则要对点云进行上采样操作,来增加点云数量,以便更好的计算曲面特征。
下采样:大规模点云处理中,由于点的无序性,如果需要对点云进行特征提取或者后处理,通常需要将对全部点云的操作转换到下采样所得到的关键点上,从而达到降低计算量的目的。
下采样
体素下采样
一般最常用的下采样方法为体素化网格的采样方法,即减少点的数量,并同时保持点云的形状特征基本不变,同时基本上保留了空间结构信息。在点云配准、曲面重建、形状识别等算法速度中非常实用。
体素下采样的原理如图 1 所示,首先将点云空间进行网格化,也称体素化,即图 1(b),网格化后的每一个格子称为体素,在这些划分为一个个极小的格子中包含一些点,然后对这些点取平均或加权平均得到一个点,以此来替代原来网格中所有的点,即图 1(c) 中蓝色的点。显然,网格选取越大则采样之后的点云越少,处理速度变快,但会对原先点云过度模糊,网格选取越小,则作用相反。
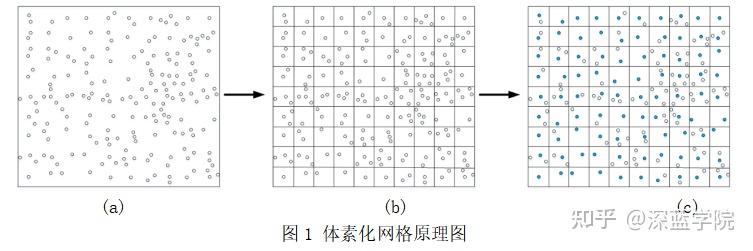
体素下采样的特点是效率高,采样点分布相对比较均匀,同时可以通过控制网格尺寸控制点间距,但是不能精确控制采样点个数。
其核心代码如下:
1
2
3
4
| pcl::VoxelGrid<pcl::PointXYZ> sor; //创建体素网格采样处理对象
sor.setInputCloud(cloud); //设置输入点云
sor.setLeafSize(0.01f, 0.01f, 0.01f); //设置体素大小,单位:m
sor.filter(*cloud_filtered); //进行下采样
|
近似体素重心下采样-ApproximateVoxelGrid
Point Cloud Library (PCL): pcl::ApproximateVoxelGrid< PointT > Class Template Reference
ApproximateVoxelGrid近似体素滤波企图以更快的速度 实现与VoxelGrid 体素滤波相同的下采样,它通过 散列函数(通俗地理解哈希函数 - 知乎)快速逼近质心,而不是精细确定质心并对点云进行下采样。采样结果是近似逼近的体素质心,并不是体素中心。
同一规格体素下,近似体素下采样 比 体素下采样 获取的下采样点数多,且耗时短。
其核心代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
| #include <pcl/io/pcd_io.h>
#include <pcl/filters/approximate_voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/time.h>
using namespace std;
int main()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
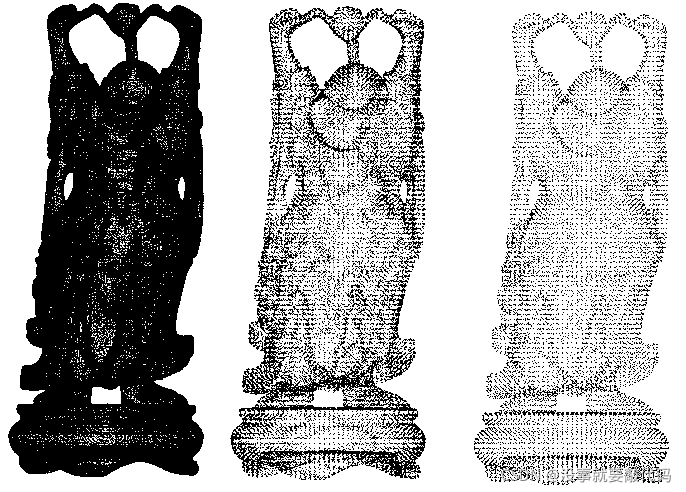
if (pcl::io::loadPCDFile("happy buddha.pcd", *cloud) < 0)
{
PCL_ERROR("\a点云文件不存在!\n");
system("pause");
return -1;
}
cout << "->加载点云的点数为:" << cloud->points.size() << endl;
pcl::console::TicToc time;
time.tic();
cout << "->正在进行近似体素重心下采样..." << endl;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_sub(new pcl::PointCloud<pcl::PointXYZ>);
pcl::ApproximateVoxelGrid<pcl::PointXYZ> avg;
avg.setInputCloud(cloud);
avg.setLeafSize(0.002, 0.002, 0.002);
avg.setDownsampleAllData(false);
avg.filter(*cloud_sub);
cout << "->近似体素下采样用时:" << time.toc() / 1000 << " s" << endl;
cout << "->正在保存滤波点云..." << endl;
if (!cloud_sub->empty())
{
pcl::io::savePCDFileBinary("ApproximateVoxelGrid.pcd", *cloud_sub);
cout << "->下采样点云的点数为" << cloud_sub->points.size() << endl;
}
else
{
PCL_ERROR("\a下采样点云为空!\n");
system("pause");
return -1;
}
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("下采样前后对比"));
int v1(0);
viewer->createViewPort(0.0, 0.0, 0.5, 1.0, v1);
viewer->setBackgroundColor(0, 0, 0, v1);
viewer->addText("original_Pt", 10, 10, "v1_text", v1);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "original", v1);
int v2(0);
viewer->createViewPort(0.5, 0.0, 1.0, 1.0, v2);
viewer->setBackgroundColor(0.3, 0.3, 0.3, v2);
viewer->addText("filtered_Pt", 10, 10, "v2_text", v2);
viewer->addPointCloud<pcl::PointXYZ>(cloud_sub, "sub", v2);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "original", v1);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0, 0, "original", v1);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "sub", v2);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0, "sub", v2);
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
return 0;
}
|
均匀采样
均匀采样的原理类似于体素化网格采样方法,同样是将点云空间进行划分,不过是以半径 = r 的球体,在当前球体所有点中选择距离球体中心最近的点替代所有点,注意,此时点的位置是不发生移动的。球体半径选取越大则采样之后的点云越少,处理速度变快,但会对原先点云过度模糊,网格选取越小,则作用相反。
均匀采样的特点是采样点分布均匀,不会移动点云点,准确度较高,但时间复杂度提升。
其核心代码如下:
1
2
3
4
5
| pcl::UniformSampling<pcl::PointXYZ> form;
form.setInputCloud(cloud);
form.setRadiusSearch(0.02f);
form.filter(*after_cloud);
|
几何采样
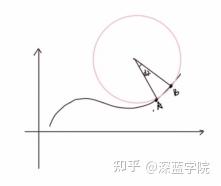
其原理是以点云的几何特征作为采样依据,这里以曲率为例。在点云中任意一点都存在某曲面,曲率计算示意图如图 2 所示,曲率越大,弧的弯曲程度越大,表示该地方的特征点越多,故在点云曲率越大的地方,采样点数越多,实现方法如下:
首先计算每个点的 K 领域,然后计算点到领域点的法线夹角值,以此来近似达到曲率的效果并提高计算效率,因为曲率越大的地方,夹角值越大。
设置一个角度阈值,当点的领域夹角值大于阈值时被认为是特征明显的区域,其余区域为不明显区域。
对明显和不明显区域进行均匀采样,采样数分别为 U*(1-V) 和 U*V,U 是目标采样数,V 是均匀采样性。
其特点是计算效率高,且局部点云的采样是均匀的,同时稳定性高,使得采样结果的抗噪性更强。
随机下采样
随机下采样的原理十分简单,如图 3 所示,首先指定下采样的点数,然后进行随机点去除进行采样操作, 得到图 3(b)。
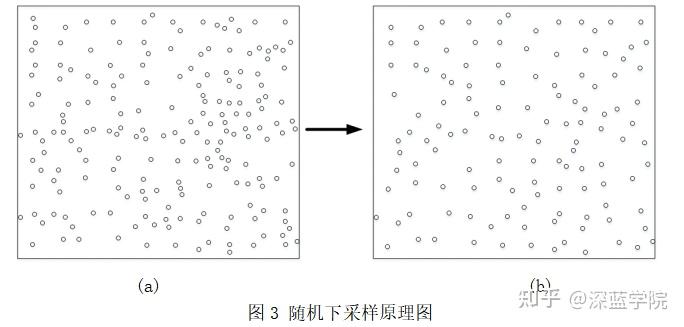
随机下采样的特点是能控制输出点云的数量,但随机性太大,可能剔除点云的关键数据。
其核心代码如下:
1
2
3
4
5
6
| pcl::RandomSample<PointT> ran;
ran.setInputCloud(cloud);
ran.setSample(200);
ran.setSeed(1);
ran.filter(*after_cloud);
|
上采样
增采样的原理如图 4 所示,当目前拥有的点云数据量较少时,如图 4(a),通过内插点云的方法对目前的点云数据对进行扩充,如图 4(b),达到保证基本形状不变的情况下增加点云。
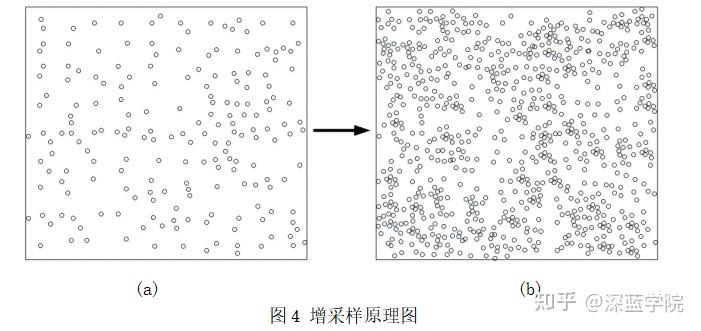
增采样的特点是可极大的增加点云数据,但由于内插点的不确定性会导致最后输出的结果不一定准确。
其核心代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
|
pcl::MovingLeastSquares<pcl::PointXYZ,pcl::PointXYZ> filter;
filter.setInputCloud(cloud);
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree;
filter.setSearchMethod(kdtree);
filter.setSearchRadius(0.03);
filter.setUpsamplingMethod(pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointXYZ>::SAMPLE_LOCAL_PLANE);
filter.setUpsamplingRadius(0.03);
filter.setUpsamplingStepSize(0.02);
filter.process(*after_cloud);
|
点云平滑
滑动最小二乘法采样
滑动最小二乘法采样的原理是将点云进行了滑动最小二乘法的映射,使得输出的点云更加平滑。
滑动最小二乘法的特点是适用于点云的光顺处理,但有时会牺牲表面拟合精度的代价来获得输出点云。
其核心代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
| pcl::PointCloud<pcl::PointNormal>::Ptr smoothedCloud(new pcl::PointCloud<pcl::PointNormal>);
pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal> filter;
pcl::search::KdTree<pcl::PointXYZ>::Ptr kdtree;
filter.setInputCloud(cloud);
filter.setUpsamplingMethod();
filter.setSearchRadius(10);
filter.setPolynomialFit(true);
filter.setPolynomialFit(3);
filter.setComputeNormals(true);
filter.setSearchMethod(kdtree);
filter.process(*smoothedCloud);
|
总结:
总结一下,在下采样方法中,以体素化网格采样方法最为常用,因为其速度快,代码量少,且满足大多数时的点云处理要求;均匀采样虽然精度高,当耗时高,可以用于更追求精度的场合下;几何采样由于使用不多,方法很多,这里只是简答介绍了一下曲率采样,比较适用于不规则的且丰富表面特征的点云数据计算;随机下采样由于能准确控制点云的输出数量,但过于随机,较少使用;增采样用于增加点云数据,更适合用于解决曲面重建时点云数量缺少的问题;而滑动最小二乘法同样是对点云数量的扩充,但主要是对点云形状进行平滑处理,所以更适合用来对点云结构进行优化。
